 25. 9. 2011
25. 9. 2011V jakémkoli měřicím systému – od bezdrátové komunikace až po digitální fotografii – je poměr signálu k šumu (SNR) základním měřítkem kvality. Ať už analyzujete snímky z dalekohledu, vylepšujete nahrávky z mikrofonu nebo řešíte problémy s bezdrátovým spojením, SNR vám říká, kolik užitečných informací vyniká na rozdíl od nežádoucího šumu na pozadí.
Správný výpočet SNR však není vždy jednoduchý. V závislosti na systému může být nutné zvážit další faktory, jako je temný proud, čtecí šum nebo slučování pixelů. Tato příručka vás provede teorií, základními vzorci, běžnými chybami, aplikacemi a praktickými způsoby, jak zlepšit SNR, a zajistí, že jej budete moci přesně aplikovat v široké škále kontextů.
Co je poměr signálu k šumu (SNR)?
Ve své podstatě poměr signálu k šumu měří vztah mezi silou požadovaného signálu a šumem pozadí, který jej zakrývá.
● Signál = smysluplná informace (např. hlas ve volání, hvězda na snímku z dalekohledu).
● Šum = náhodné, nežádoucí fluktuace, které zkreslují nebo zakrývají signál (např. statická elektřina, šum senzoru, elektrické rušení).
Matematicky je SNR definován jako:

Protože se tyto poměry mohou měnit v řádech mnoha řádů, je odstup signálu od šumu (SNR) obvykle vyjádřen v decibelech (dB):
● Vysoký odstup signálu od šumu (např. 40 dB): signál dominuje, což vede k jasným a spolehlivým informacím.
● Nízký odstup signálu od šumu (např. 5 dB): šum přehlušuje signál, což ztěžuje interpretaci.
Jak vypočítat poměr signálu k šumu (SNR)
Výpočet poměru signálu k šumu lze provádět s různou úrovní přesnosti v závislosti na tom, jaké zdroje šumu jsou zahrnuty. V této části budou představeny dva způsoby výpočtu: jeden, který zohledňuje temný proud, a druhý, který předpokládá, že jej lze zanedbat.
Poznámka: Sečtení nezávislých hodnot šumu vyžaduje jejich sečtení v kvadratuře. Každý zdroj šumu se umocní na druhou, sečte a z celkového součtu se odmocní.
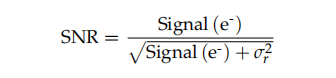
Poměr signálu k šumu s temným proudem
Následuje rovnice, která se používá v situacích, kdy je šum temného proudu dostatečně velký, aby vyžadoval jeho zahrnutí:

Zde je definice pojmů:
Signál (e-): Toto je signál fotoelektronů, které nás zajímají, po odečtení signálu temného proudu.

Celkový signál (e-) bude počet fotoelektronů v daném pixelu – striktně ne hodnota pixelu v jednotkách stupňů šedi. Druhým příkladem signálu (e-) ve spodní části rovnice je šum fotonového výstřelu.
Temný proud (DC):Hodnota tmavého proudu pro daný pixel.
t: Doba expozice v sekundách
σr:Čtení šumu v režimu fotoaparátu.
Poměr signálu k šumu pro zanedbatelný temný proud
V případech krátkých (< 1 sekunda) expozičních časů a chlazených, vysoce výkonných kamer bude šum temného proudu obecně hluboko pod úrovní šumu při čtení a bezpečně se zanedbá.
Kde jsou pojmy opět definovány výše, s tou výjimkou, že signál temného proudu není nutné vypočítávat a odečítat od signálu, protože by se měl rovnat nule.
Omezení těchto vzorců a chybějící členy
Vzorce na protější straně poskytnou správné odpovědi pouze pro CCD aCMOS kameryEMCCD a zesílená zařízení zavádějí další zdroje šumu, takže tyto rovnice nelze použít. Pro úplnější rovnici poměru signálu k šumu, která zohledňuje tyto a další příspěvky.
Dalším šumovým pojmem, který je (nebo býval) běžně zahrnut v rovnicích SNR, je nerovnoměrnost fotoodezvy (PRNU), někdy označovaná také jako „šum s pevným vzorem“ (FPN). Ten představuje nerovnoměrnost zesílení a odezvy signálu napříč senzorem, která se může stát dominantní při dostatečně vysokých signálech, což snižuje SNR.
Zatímco rané fotoaparáty měly dostatečně významný PRNU, aby vyžadovaly jeho zahrnutí, většina moderníchvědecké kamerymají dostatečně nízký PRNU, aby jeho příspěvek byl výrazně nižší než příspěvek fotonového šumu, zejména po aplikaci integrovaných korekcí. Proto se nyní při výpočtech SNR obvykle zanedbává. PRNU je však stále důležitý pro některé fotoaparáty a aplikace a pro úplnost je zahrnut v pokročilejší rovnici SNR. To znamená, že uvedené rovnice jsou užitečné pro většinu CCD/CMOS systémů, ale neměly by být považovány za univerzálně použitelné.
Typy šumu ve výpočtech SNR
Výpočet SNR není jen o porovnání signálu s jednou hodnotou šumu. V praxi se podílí více nezávislých zdrojů šumu a jejich pochopení je nezbytné.
Hluk výstřelu
● Původ: statistický příchod fotonů nebo elektronů.
● Škáluje se podle druhé odmocniny signálu.
● Dominantní v zobrazování s omezeným využitím fotonů (astronomie, fluorescenční mikroskopie).
Tepelný šum
● Také se mu říká Johnsonův-Nyquistův šum a vzniká v důsledku pohybu elektronů v rezistorech.
● Zvyšuje se s teplotou a šířkou pásma.
● Důležité v elektronice a bezdrátové komunikaci.
Šum temného proudu
● Náhodné kolísání temného proudu v senzorech.
● Významnější u dlouhých expozic nebo u teplých detektorů.
● Sníženo ochlazením senzoru.
Čtení šumu
● Šum ze zesilovačů a analogově-digitálního převodu.
● Pevná hodnota pro každý odečet, proto je kritická v režimech s nízkým signálem.
Kvantizační šum
● Zavedená digitalizací (zaokrouhlování na diskrétní úrovně).
● Důležité v systémech s nízkou bitovou hloubkou (např. 8bitový zvuk).
Hluk prostředí/systému
● Elektromagnetické rušení, přeslechy, zvlnění napájení.
● Může dominovat, pokud je stínění/uzemnění špatné.
Pochopení toho, který z nich je dominantní, pomáhá při výběru správné receptury a metody zmírňování.
Časté chyby při výpočtu SNR
Je snadné narazit na mnoho „zkrácených“ metod pro odhad poměru signálu k šumu v zobrazování. Tyto metody bývají buď méně složité než rovnice na protější straně, umožňují snadnější odvození ze samotného obrazu, než aby vyžadovaly znalost parametrů kamery, jako je šum při čtení, nebo obojí. Bohužel je pravděpodobné, že každá z těchto metod je nesprávná a povede ke zkresleným a neužitečným výsledkům. Důrazně se doporučuje ve všech případech používat rovnice na protější straně (nebo pokročilejší verzi).
Mezi nejčastější falešné zkratky patří:
1. Porovnání intenzity signálu s intenzitou pozadí v odstínech šedi. Tento přístup se pokouší posoudit citlivost kamery, sílu signálu nebo poměr signálu k šumu porovnáním maximální intenzity s intenzitou pozadí. Tento přístup je hluboce chybný, protože vliv posunu kamery může libovolně nastavit intenzitu pozadí, zesílení může libovolně nastavit intenzitu signálu a není zohledněn žádný příspěvek šumu, ať už v signálu nebo pozadí.
2. Dělení vrcholů signálu směrodatnou odchylkou oblasti pixelů pozadí. Nebo porovnání hodnot vrcholů s vizuálním šumem v pozadí odhaleným čárovým profilem. Za předpokladu, že je posunutí správně odečteno od hodnot před dělením, je nejvýznamnějším nebezpečím v tomto přístupu přítomnost světla pozadí. Jakékoli světlo pozadí bude obvykle dominovat šumu v pixelech pozadí. Šum v sledovaném signálu, jako je například šum výstřelu, se ve skutečnosti vůbec nebere v úvahu.
3. Průměrný signál v sledovaných pixelech vs. směrodatná odchylka hodnot pixelů: Porovnání nebo pozorování, jak moc se špičkový signál mění napříč sousedními pixely nebo po sobě jdoucími snímky, je blíže správnému výsledku než jiné zkrácené metody, ale je nepravděpodobné, že by se vyhnulo dalším vlivům zkreslujícím hodnoty, jako je například změna signálu, která není způsobena šumem. Tato metoda může být také nepřesná kvůli nízkému počtu pixelů v porovnání. Nesmíme také zapomenout na odečtení hodnoty posunu.
4. Výpočet poměru signálu k šumu (SNR) bez převodu na jednotky intenzity fotoelektronů nebo bez odstranění ofsetu: Vzhledem k tomu, že šum fotonů je obvykle největším zdrojem šumu a pro měření se spoléhá na znalost ofsetu a zisku kamery, není možné se pro výpočet SNR vyhnout zpětnému výpočtu na fotoelektrony.
5. Posouzení poměru signálu k šumu (SNR) okem: I když za určitých okolností může být posouzení nebo porovnání SNR okem užitečné, existují i neočekávaná úskalí. Posouzení SNR u pixelů s vysokou hodnotou může být obtížnější než u pixelů s nízkou hodnotou nebo v pixelech pozadí. Svou roli mohou hrát i jemnější efekty: Například různé počítačové monitory mohou vykreslovat obrazy s velmi odlišným kontrastem. Zobrazování obrazů s různými úrovněmi přiblížení v softwaru může dále významně ovlivnit vizuální vzhled šumu. To je obzvláště problematické při porovnávání kamer s různými velikostmi pixelů v objektu. A konečně, přítomnost světla pozadí může znemožnit jakýkoli pokus o vizuální posouzení SNR.
Aplikace signálu od šumu (SNR)
SNR je univerzální metrika s širokým spektrem aplikací:
● Nahrávání zvuku a hudby: Určuje čistotu, dynamický rozsah a věrnost nahrávek.
● Bezdrátová komunikace: Poměr signálu k šumu (SNR) přímo souvisí s mírou chybovosti bitů (BER) a propustností dat.
● Vědecké zobrazování: V astronomii vyžaduje detekce slabých hvězd na pozadí záře oblohy vysoký poměr signálu k šumu (SNR).
● Lékařské vybavení: EKG, magnetická rezonance a CT vyšetření se spoléhají na vysoký poměr signálu k šumu (SNR) pro rozlišení signálů od fyziologického šumu.
● Fotoaparáty a fotografování: Spotřebitelské fotoaparáty i vědecké CMOS senzory používají poměr signálu k šumu (SNR) k porovnání výkonu za slabého osvětlení.
Zlepšení signálu od šumu (SNR)
Vzhledem k tomu, že poměr signálu k šumu (SNR) je tak kritickým měřítkem, vynakládá se značné úsilí na jeho zlepšení. Mezi strategie patří:
Hardwarové přístupy
● Používejte lepší senzory s nižším temným proudem.
● Pro snížení elektromagnetického rušení použijte stínění a uzemnění.
● Chladné detektory pro potlačení tepelného šumu.
Softwarové přístupy
● Použijte digitální filtry k odstranění nežádoucích frekvencí.
● Použijte průměrování napříč více snímky.
● Využívejte algoritmy pro redukci šumu při zpracování obrazu nebo zvuku.
Binning pixelů a jeho vliv na signál od šumu (SNR)
Vliv binningu na poměr signálu k šumu závisí na technologii kamery a chování senzoru, protože šumový výkon binningových a nebinovaných kamer se může výrazně lišit.
CCD kamery dokáží sčítat náboj sousedních pixelů „na čipu“. Šum při čtení vzniká pouze jednou, i když se sčítá i signál tmavého proudu z každého pixelu.
Většina CMOS kamer provádí binning mimo čip, což znamená, že hodnoty se nejprve změří (zavede se šum při čtení) a poté se digitálně sčítají. Šum při čtení se u takových sčítání zvýší vynásobením druhou odmocninou z počtu sčítaných pixelů, tj. dvojnásobkem pro binning 2x2.
Vzhledem k tomu, že šumové chování senzorů může být složité, je pro kvantitativní aplikace vhodné měřit offset, zesílení a čtecí šum kamery v binovaném režimu a tyto hodnoty použít pro rovnici poměru signálu k šumu.
Závěr
Poměr signálu k šumu (SNR) je jednou z nejdůležitějších metrik ve vědě, inženýrství a technologii. Od definování srozumitelnosti telefonních hovorů až po umožnění detekce vzdálených galaxií je SNR základem kvality měřicích a komunikačních systémů. Zvládnutí SNR není jen o memorování vzorců – jde o pochopení předpokladů, omezení a kompromisů v reálném světě. Z tohoto pohledu mohou inženýři a výzkumníci provádět spolehlivější měření a navrhovat systémy, které získají smysluplné poznatky i v hlučných podmínkách.
Chcete se dozvědět více? Podívejte se na související články:
Tucsen Photonics Co., Ltd. Všechna práva vyhrazena. Při citaci prosím uveďte zdroj:www.tucsen.com








