 22. 6. 2015
22. 6. 2015Zachycení rozostřeného světla je v mnoha zobrazovacích aplikacích výzvou pro dosažení jasných a vysoce kontrastních snímků. Digitální skenovaná světelná archová mikroskopie (DSLM) nabízí účinný způsob, jak omezit zachycení rozostřeného světla synchronizací osvětlení s „rolující závěrkou“ moderních CMOS kamer. Tato přesná synchronizace však vyžaduje úplnou kontrolu nad provozem rolující závěrky kamery – funkci, kterou nabízejí kamery Tucsen s režimem řízení rolující závěrky.
Co je to rolovací závěrka?
Závěrka je část fotoaparátu, která spouští a zastavuje expozici světla. Dříve vědecké fotoaparáty používaly mechanické závěrky, které se otevíraly pro expozici obrazu a zavíraly pro ukončení expozice. Mechanické závěrky byly pomalé a při delším používání trpěly problémy se spolehlivostí. Nyní vědecké fotoaparáty používají elektronické závěrky, které jsou výrazně rychlejší, jednodušší a všestrannější.
Kamery s rolovací závěrkou začínají snímání v horní části senzoru a „rolují“ řádek po řádku až ke spodní části senzoru. Toto snímání zahrnuje tři procesy: reset signálu, expozici světla a načtení.
Expozice každého řádku se zahájí resetováním získaného signálu každého pixelu. Po uplynutí určené doby expozice pro horní řádek se údaj označující konec snímání stejným způsobem scrolluje dolů. Zůstane tak oblast aktivních pixelů, která se táhne od horní části kamery dolů a jejíž výška je určena délkou expoziční doby. Při plné rychlosti kamery je zpoždění na řádek obvykle mezi 5 a 25 mikrosekundami na řádek pixelů v závislosti na rychlosti kamery.
Aby bylo možné využít optické techniky vyžadující synchronizaci skenování osvětlení a rolovací závěrky kamery, je toto zpoždění obvykle příliš krátké, což znamená, že rolovací závěrka pracuje příliš rychle na to, aby s ní ostatní hardware držel krok. Zde přichází na řadu režim ovládání rolovací závěrky.
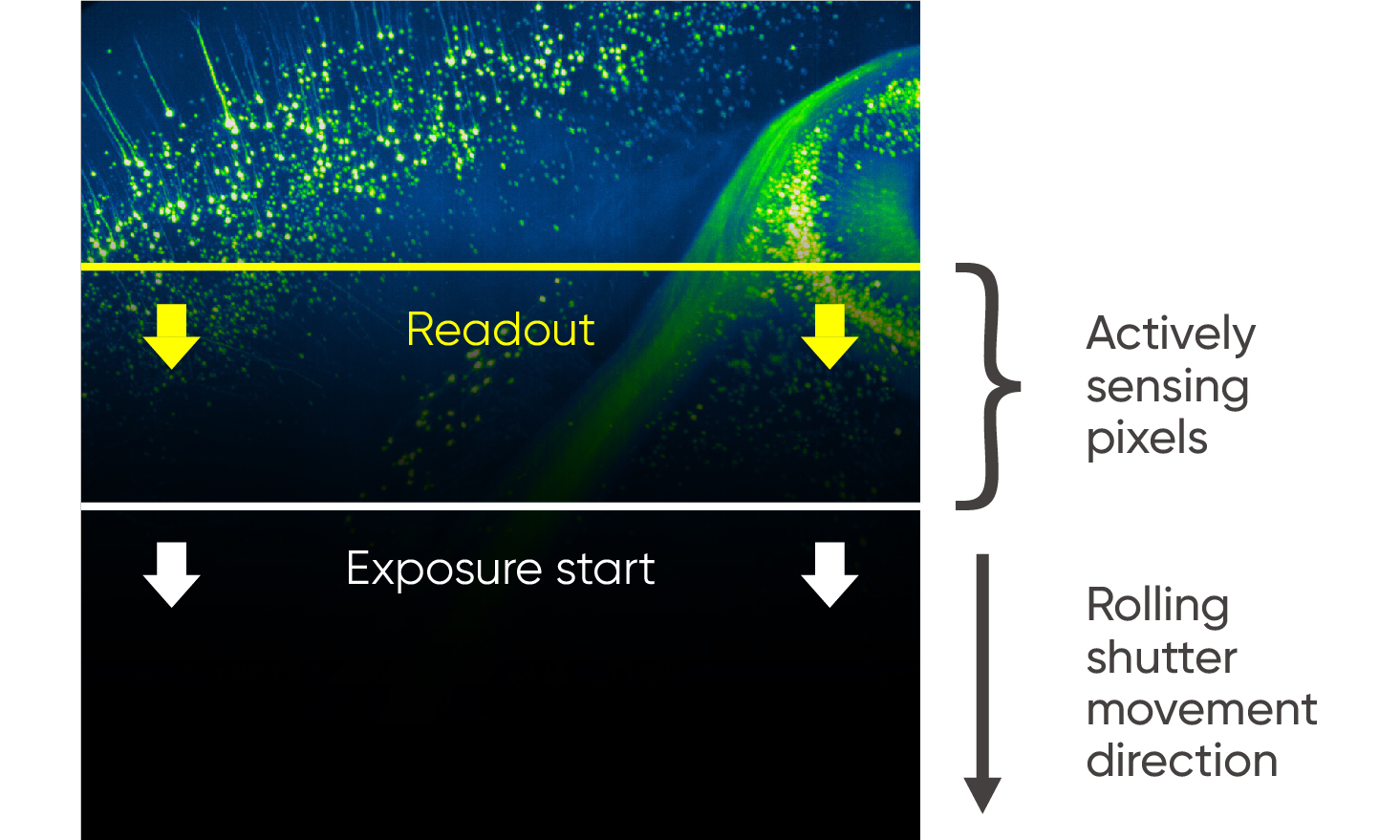
Obrázek 1: Schéma provozu rolovacích vrat
Jak funguje režim ovládání rolety
Díky integrované inteligenci uvnitř kamer Tucsen lze přesně vyladit činnost rolovací závěrky kamery pro synchronizaci s externím hardwarem. Přidáním malého dodatečného zpoždění mezi resetováním a načtením každého řádku lze řídit dobu potřebnou k tomu, aby aktivní pixelová oblast přejela po snímači, a umožnit tak tuto synchronizaci.
Dále lze jemně doladit „výšku štěrbiny“ skenované aktivní oblasti. Delší expoziční časy nebo kratší časové zpoždění čáry vedou k větší výšce štěrbiny. V případě DSLM lze toto použít k porovnání pouze osvětlené oblasti vzorku, čímž se dosáhne rovnováhy mezi expozicí pixelů po maximální možnou dobu pro efektivní zachycení signálu a minimalizací rozostřeného světla.
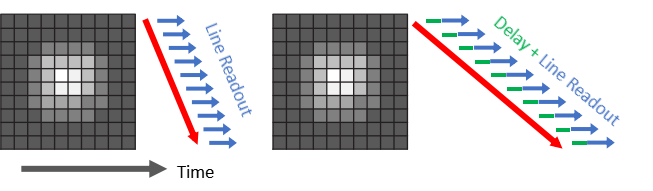
Postava2: Vlevo: Schéma provozu rolovací závěrky při plné rychlosti kamery. Vpravo: Schéma znázorňující rychlost rolovací závěrky s režimem řízení rolovací závěrky s přidáním dodatečného zpoždění mezi jednotlivými řádky pro umožnění synchronizace s dalším hardwarem.
S tímto volitelným zpožděním je nyní třeba pochopit tři důležité proměnné, které určují fungování rolovací závěrky, a to udávající výšku oblasti „aktivních“ pixelů a rychlost, s jakou se pohybuje po snímači.
Čas v řadě: Toto je výchozí doba, kterou senzor potřebuje k načtení jednoho řádku a přechodu na další. Určuje nativní „rychlost“ senzoru kamery a lze ji specifikovat v softwaru kamery nebo ji aproximovat pro danou oblast zájmu (ROI) a režim kamery pomocí:

Kde „Maximální snímková frekvence kamery“ označuje snímkovou frekvenci, pokud není omezena buď délkou expozice, nebo externí spouštěcí frekvencí.
Doba vystavení:Toto určuje, jak dlouho je každý řádek pixelů aktivní, a tím určuje výšku aktivní oblasti pro daný čas řádku a dobu zpoždění.
Časové zpoždění linky:Toto je o kolik dodatečného zpoždění se přidá v režimu řízení rolovací závěrky. Režim řízení rolovací závěrky umožňuje přidání zpoždění.v celočíselných násobcích času řádkuNapříklad, pokud je doba načítání kamery 10 mikrosekund, pak se připočítává dodatečné zpoždění na řádek 1, 2,…Lze přidat až 8 928, což udává počet násobků 10 mikrosekund.
Důležitá je také výška použité oblasti zájmu (ROI), protože ta určí počet čar, které musí aktivní oblast posunout dolů před resetováním.
Režim ovládání rolety, režimy synchronizace
Pro režim ovládání rolety existují dva provozní režimy v závislosti na tom, která proměnná je důležitější k ovládání.
In Režim zpoždění linky, můžete nastavit dobu zpoždění dle výše uvedeného návodu. Software pak může pro vámi zadanou dobu expozice určit výslednou výšku štěrbiny – výšku aktivních pixelů v rolovací závěrce.
In Výška aktivního pixelu / štěrbinyV režimu můžete nastavit počet řádků senzoru, které mají být aktivní při pohybu rolovací závěrky. Zadaný čas expozice bude poté použit k výpočtu požadovaného časového zpoždění linky pro automatické dosažení této výšky štěrbiny.
Nastavení režimu ovládání rolety v softwaru
Ovládací prvky provozního režimu (stavu)
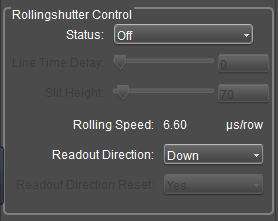
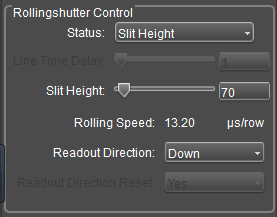
Obrázek 3: Příklad rozhraní pro ovládání režimu rolovacích shuttleů ze softwaru Tucsen Mosaic. Všechny možnosti dostupné prostřednictvím Micro-Manageru a SDK.
K dispozici jsou tři stavy (provozní režimy):Off, Časové zpoždění linky, Výška štěrbiny.
• Při nastavení naVypnuto, senzor se chová normálně bez dalšího zpoždění.
• Při nastavení naČasové zpoždění linkyV režimu můžete zadat zpoždění linky v jednotkách času linky, jak je vysvětleno výše.
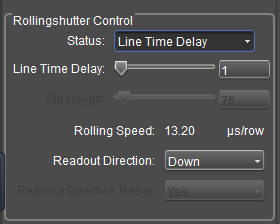
Obrázek 4: Možnosti softwaru pro zpoždění linky. Příkladrozhraní ze softwaru Tucsen Mosaic. Všechny možnosti jsou k dispozici prostřednictvím Micro-Manageru a SDK.
Počet cyklů linkového času, které lze přidat k konfigurovatelnému zpoždění, se liší u jednotlivých kamer. Nový linkový čas kamery po přidání zpoždění je pak:
Časový interval linky = Doba linky(senzor)+(Čas v řadě(senzor)× Časové zpoždění linky)
Hodnota parametruRychlost válcováníse rovnáČasový interval linky.
Celková doba načítání obrazu je pak:
RhlavaČas odchodu(obraz)= Časový interval linky×Nřádky.
Nřádkyje celkový počet řádků zobrazovacích pixelů v oblasti zájmu. Snímková frekvence při zobrazování v tomto režimu závisí na počtu zobrazených řádků a na době cyklu řádku:
Snímková frekvence = 1/(Doba čtení(obraz)+ Doba expozice)
•Při nastavení naVýška štěrbiny módu, můžete nastavitvelikost skenované aktivní oblasti, daná vztahem tPočet řádků pixelů mezi signálem „reset“ a signálem „readout“.Rozsah výšky štěrbiny je 1~2048 v pixelech. Chcete-li tuto hodnotu převést na fyzickou velikost, vynásobte tuto hodnotu velikostí pixelu z technického listu kamery.
Obrázek 5: Možnosti ovládání režimu výšky štěrbiny. Příkladrozhraní ze softwaru Tucsen Mosaic. Všechny možnosti jsou k dispozici prostřednictvím Micro-Manageru a SDK.
Software automaticky vypočítá požadované zpoždění linky a čas intervalu linky, vzorec je následující:
Časové zpoždění linky = Doba expozice(Řádky)/ Výška štěrbiny(Řádky)
V režimu Vysokorychlostní režim (režim zesílení kamery) lze rozsah výšky štěrbiny nastavit pouze na sudé číslo, protože v tomto režimu se řádky odečítají po dvou. Parametry v režimu Vysokorychlostní režim se počítají následovně.
Časové zpoždění linky = Doba expozice(Řádky)/ ½Výška štěrbiny(Řádky)
Výška štěrbiny = (Doba vystavení(Řádky)÷ Zpoždění linky)×2
Ovládací prvky směru skenování
Existují tři možnosti směru pohybu rolovací brány:
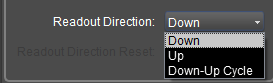
Dvlastní:Směr skenování dolů je výchozím směrem skenování pro kamery sCMOS. Funkce rolování závěrky začíná od prvního řádku nahoře na senzoru a skenuje dolů k poslednímu řádku dole. Každé další snímání snímku začíná prvním řádkem nahoře.
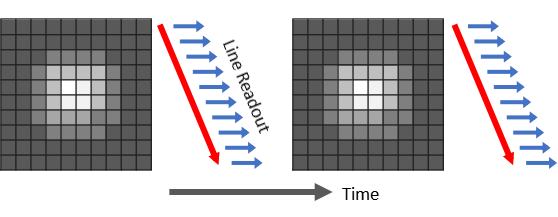
Obrázek 6: Schéma režimu skenování směrem dolů
Up:V režimu skenování směrem nahoru začíná rolovací závěrka od spodního řádku a skenuje až k hornímu řádku prvního řádku. Každé další snímání snímku začíná od spodního řádku. Přestože je pořadí snímání dat na kameře nyní obrácené, výsledný snímek přenesený do softwaru bude stále zobrazovat původní orientaci, tj. snímek nebude vertikálně převrácen vzhledem k režimu skenování směrem dolů.
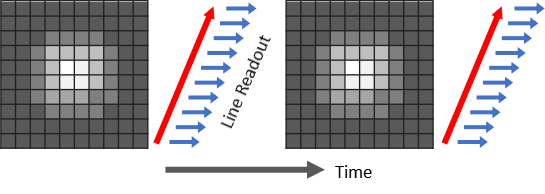
Obrázek 7: Schéma režimu vzestupného skenování
Cyklus nahoru-dolů:Při střídavém skenování nahoru a dolů začíná rolovací závěrka od prvního řádku nahoře a pokračuje dolů k poslednímu řádku dole. U dalšího snímku začíná rolovací závěrka od spodního řádku a skenuje nahoru k hornímu řádku atd. Orientace obrazu pořízeného v tomto režimu je stejná jako orientace skenování dolů.

Obrázek 8: Schéma režimu cyklického skenování dolů-nahoru
• ReaSměr doutu Reset
Tato funkce je k dispozici pouze v režimu cyklu dolů-nahoru.
Výchozí nastavení tohoto parametru je „Ano“, což zajišťuje, že první snímek každé nové sekvence snímání začne na nejvyšším řádku a bude se skenovat směrem dolů.
Pokud je tento parametr nastaven na „Ne“, první snímek každé nové akvizice začne na pozici posledního snímku v předchozí sekvenci. Pokud poslední snímek končí v dolním řádku, první snímek následných akvizic začne v dolním řádku a bude se šířit směrem nahoru.











